
Dive into the thrilling world of FPV drones! Observe our step-by-step information to assemble your personal drone. Our detailed step-by-step information walks you thru each a part of the method, from connecting the flight controller and motors to putting in the digicam and receiver.

Constructing an FPV (First-Individual View) drone is an thrilling and rewarding mission that means that you can dive deep into the world of drones, electronics, and aviation. Whether or not you are a seasoned fanatic or a newcomer to the passion, assembling your personal drone gives a hands-on expertise that enhances your understanding of how these drones work. On this complete information, we’ll stroll you thru the step-by-step means of assembling an FPV drone.
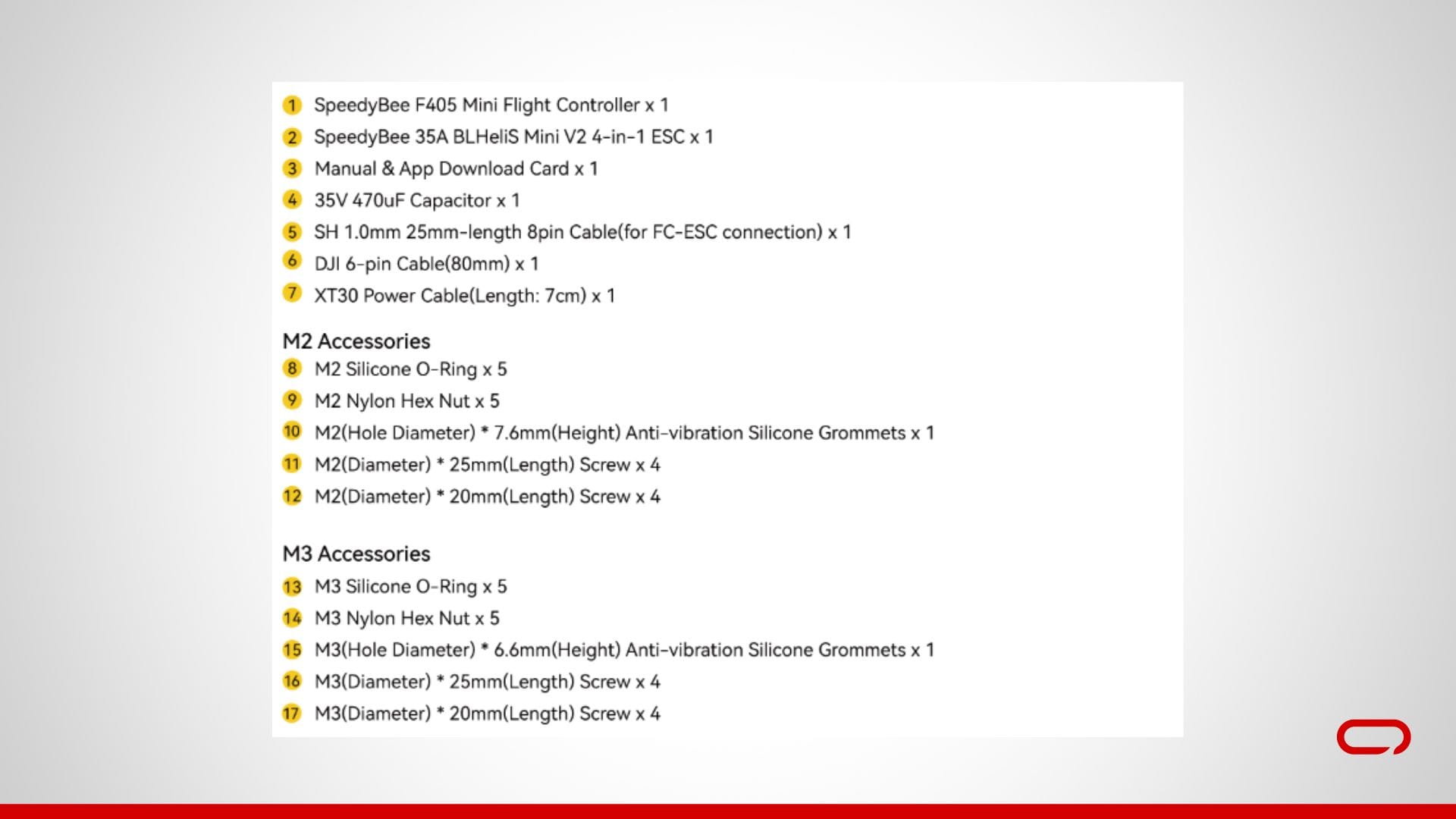
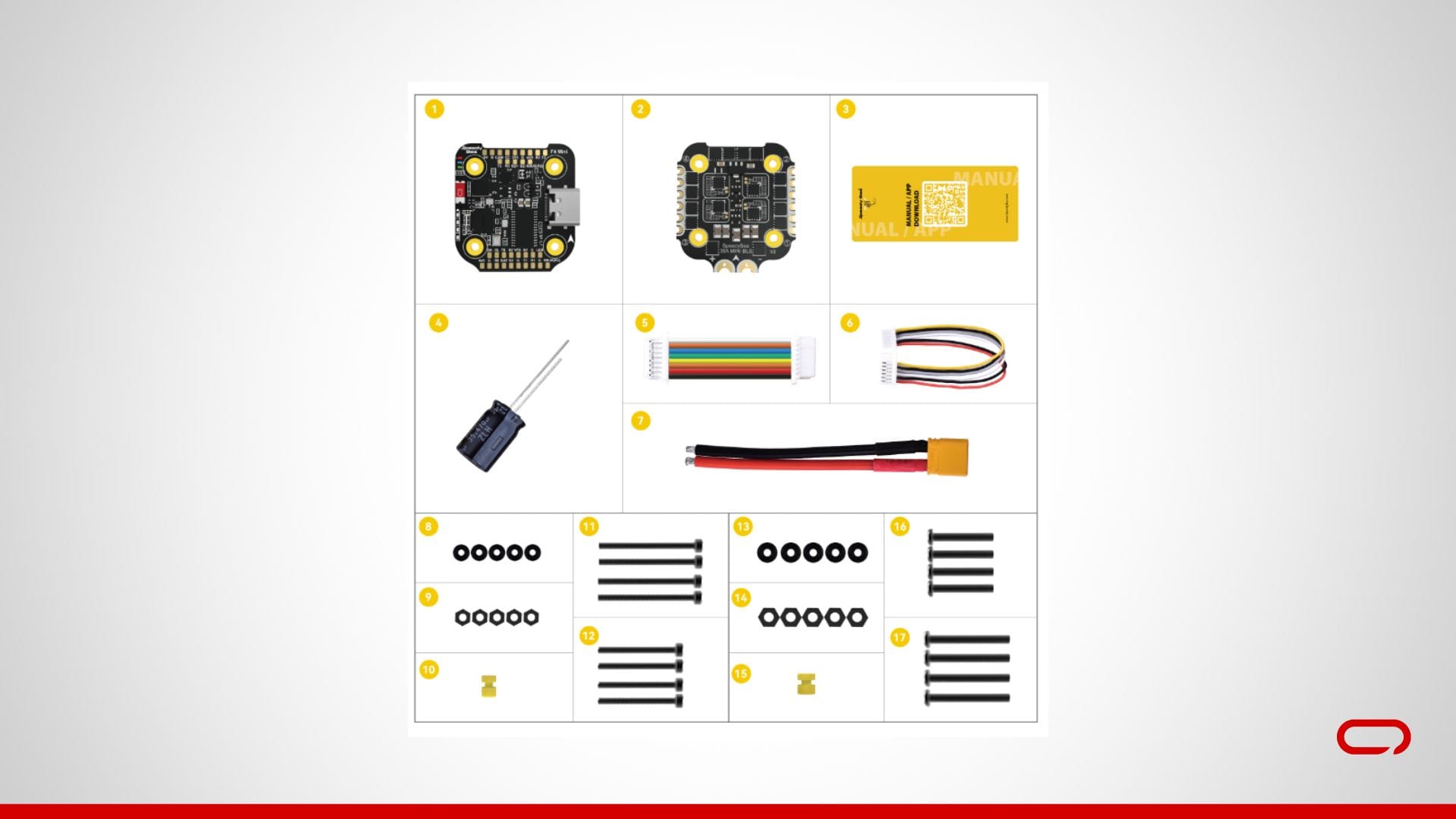
We’ll be utilizing the next components for this construct:
Instruments You Will Want
- Soldering iron and solder
- Hex keys (M2) and screwdrivers
- Electrical tape or warmth shrink tubing
- Zip ties
- Tweezers
- Double-sided tape or foam pads
Step 1: Making ready the Flight Controller (FC) and ESC Stack
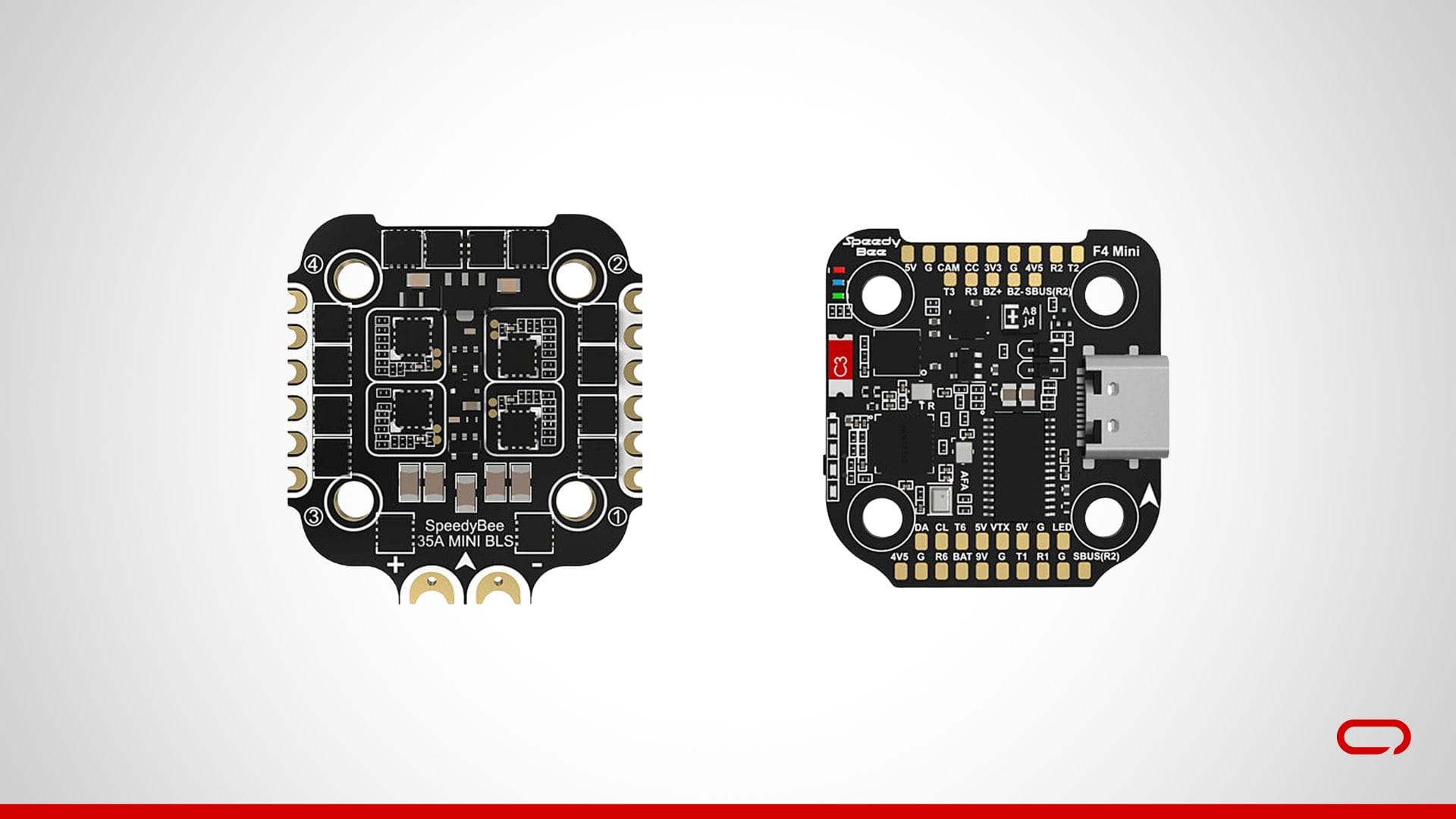
- Unbox the Stack: Begin by unboxing the SpeedyBee F405 Mini BLS 35A 20×20 Stack. Lay out all of the elements to make sure you have every part you want.
- Put together the FC: Place the FC on a non-conductive floor. Guarantee you’ve a transparent view of all of the pads.
Step 2: Putting in the FPV Digital camera

- Join the Digital camera Wires: The RunCam Nano 2 FPV Digital camera usually has three wires:
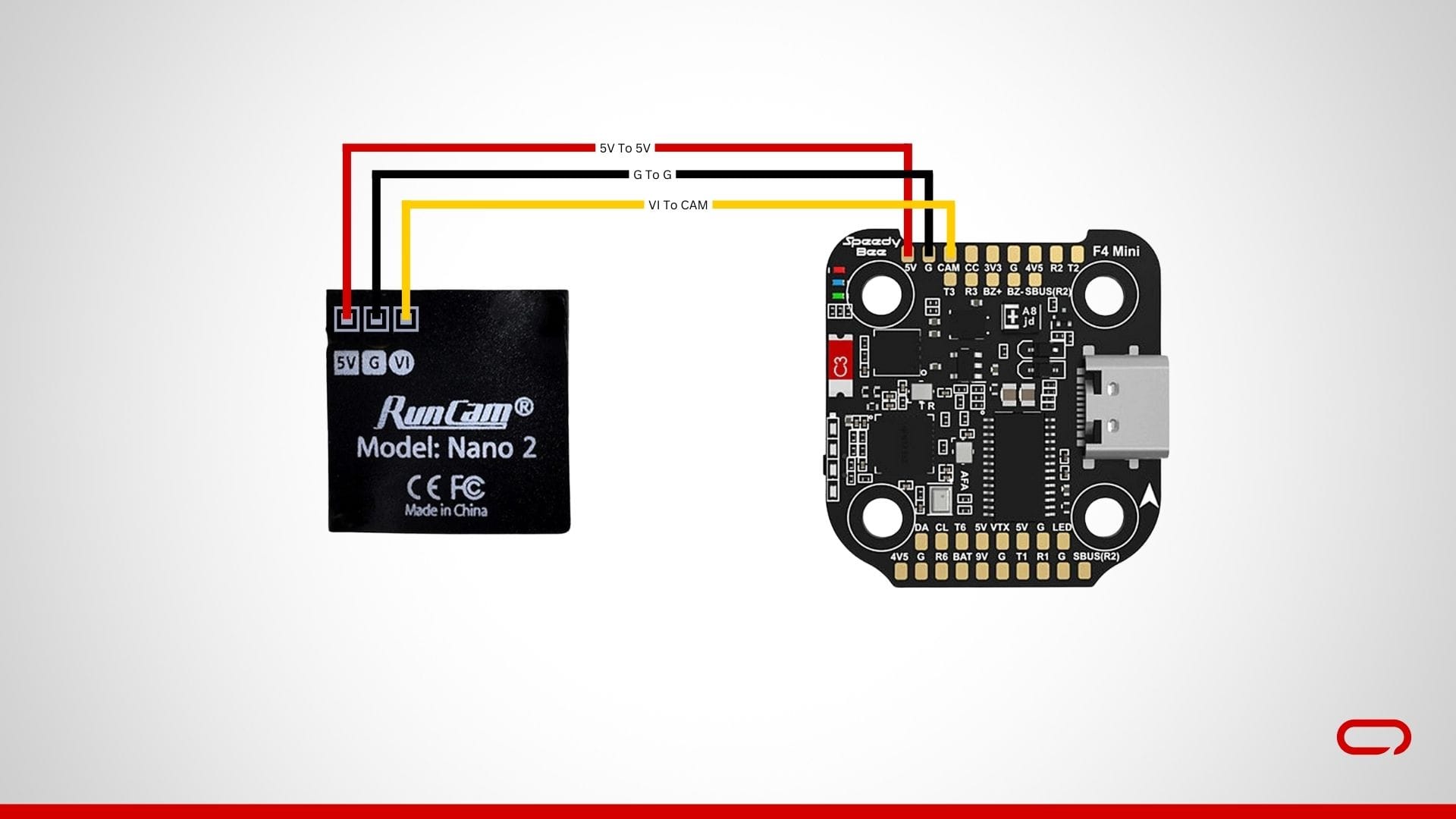
- Energy 5V (crimson): Solder to a 5V pad on the flight controller.
- Floor (black): Solder to a GND pad on the flight controller.
- Video (yellow): Solder to the CAM pad on the flight controller.
💡
Safe the Digital camera: Quickly safe the digicam to keep away from pressure on the solder joints. You’ll be able to finalize the mounting later.
Step 3: Putting in the VTX
Join the VTX Wires: The RUSH TINY TANK Nano VTX usually has a number of wires:
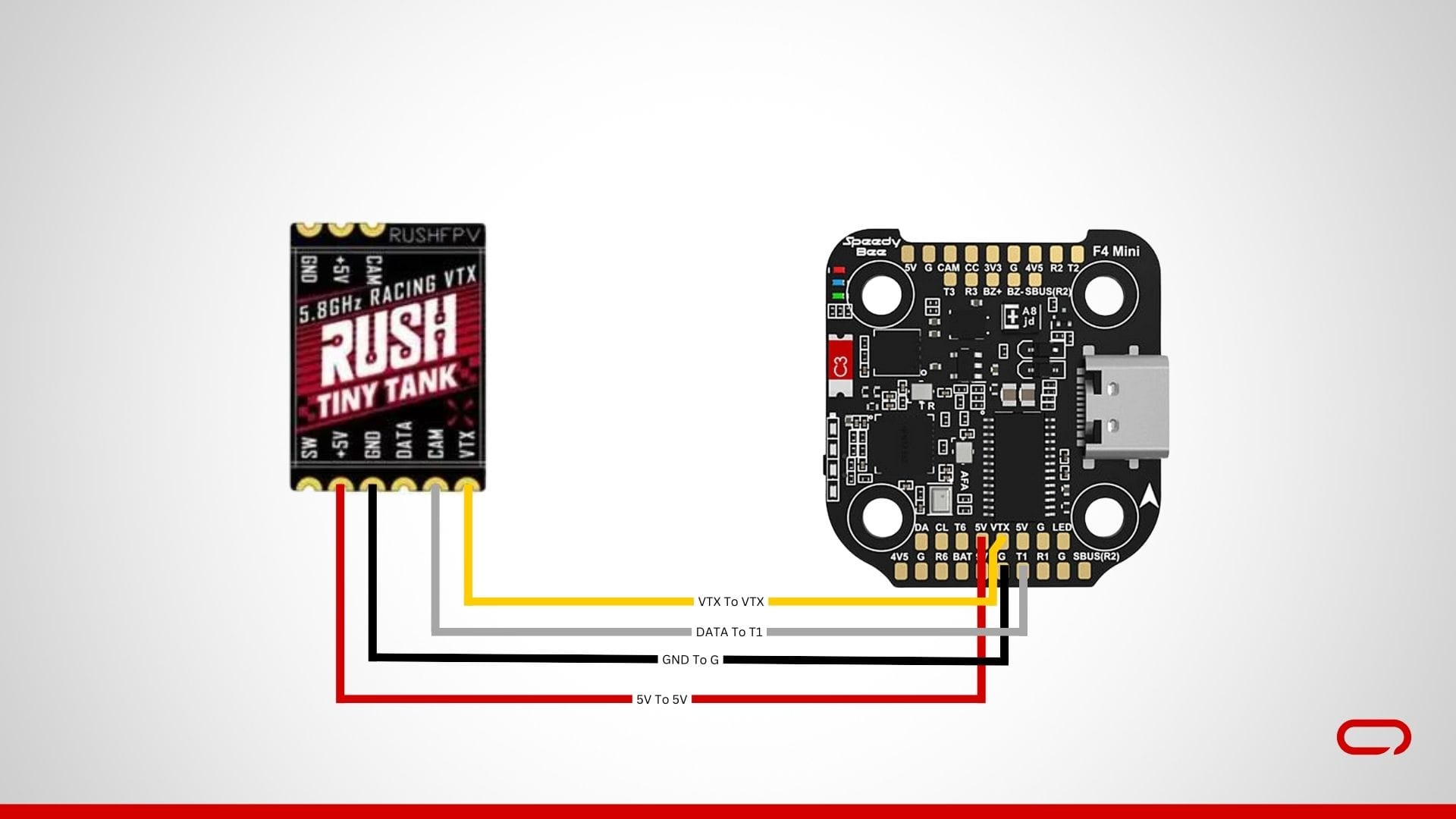
- Energy 5V (crimson): Solder to a 5V pad on the flight controller.
- Floor (black): Solder to a GND pad on the flight controller.
- VTX (yellow): Solder to the VTX pad on the flight controller.
- Information – SmartAudio (white): Solder to the T1 pad on a UART port on the flight controller for VTX management.
💡
After finishing the wiring, it is essential to not overlook connecting your antenna
💡
Safe the VTX: Quickly safe the VTX to keep away from pressure on the solder joints. You’ll be able to finalize the mounting later.

💡
You should use the growth boards proven within the image above for simpler soldering with the VTX.
Step 4: Putting in the Receiver

Join the Receiver Wires: The SpeedyBee Nano 2.4G ExpressLRS ELRS Receiver can have a number of wires:
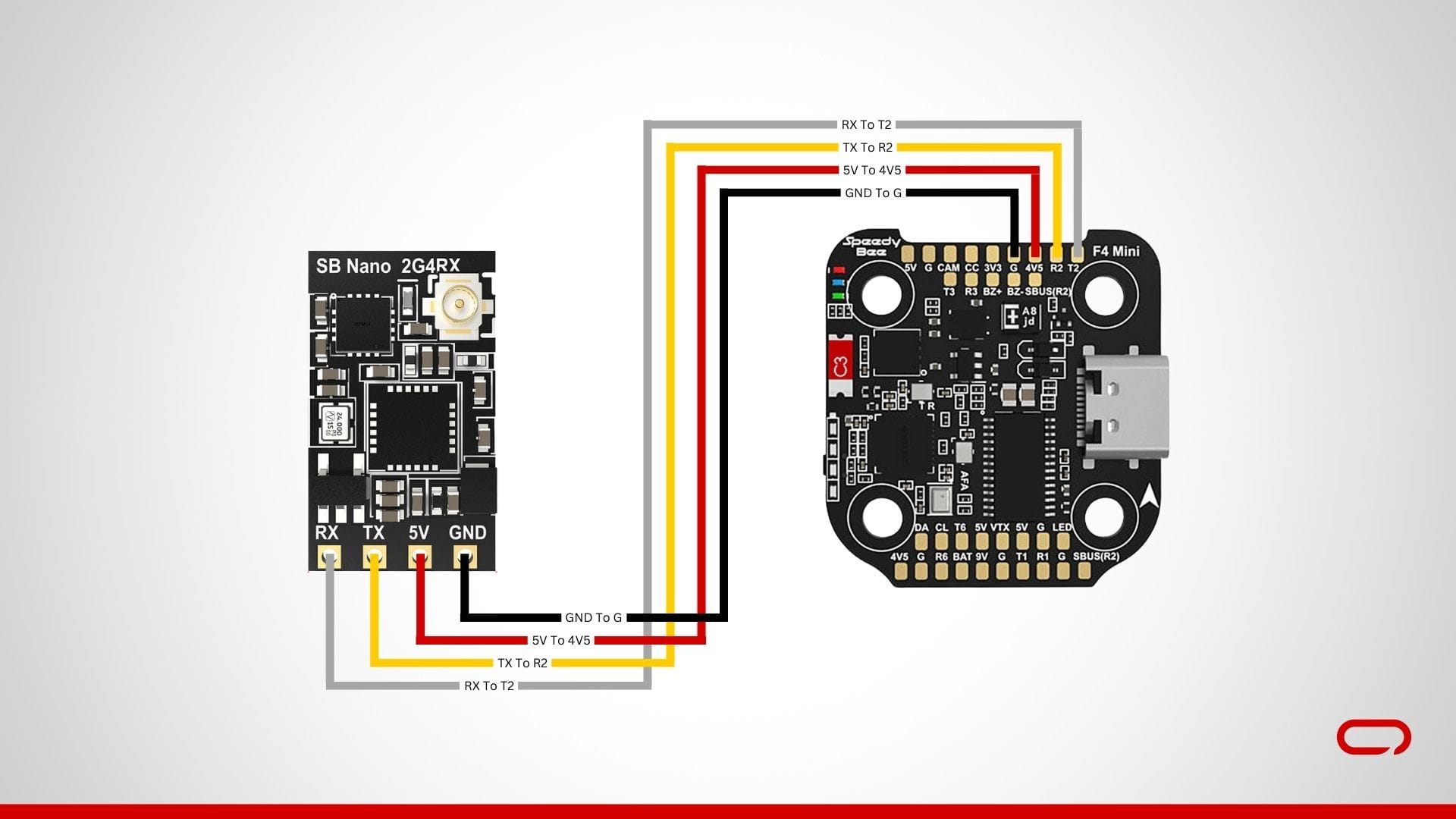
- Energy 5V (crimson): Solder to a 5V pad on the flight controller.
- Floor (black): Solder to a GND pad on the flight controller.
- TX (yellow): Solder to the R2 pad on a UART port on the flight controller (usually UART2).
- RX (white): Solder to the T2 pad on a UART port on the flight controller (usually UART2).
💡
After finishing the wiring, it is essential to not overlook connecting your antenna
💡
Safe the Receiver: Quickly safe the receiver to keep away from pressure on the solder joints. You’ll be able to finalize the mounting later.
Step 5: Soldering the Battery Leads and Capacitor
Put together the ESC: Place the ESC on a non-conductive floor. Guarantee you’ve a transparent view of all of the pads.
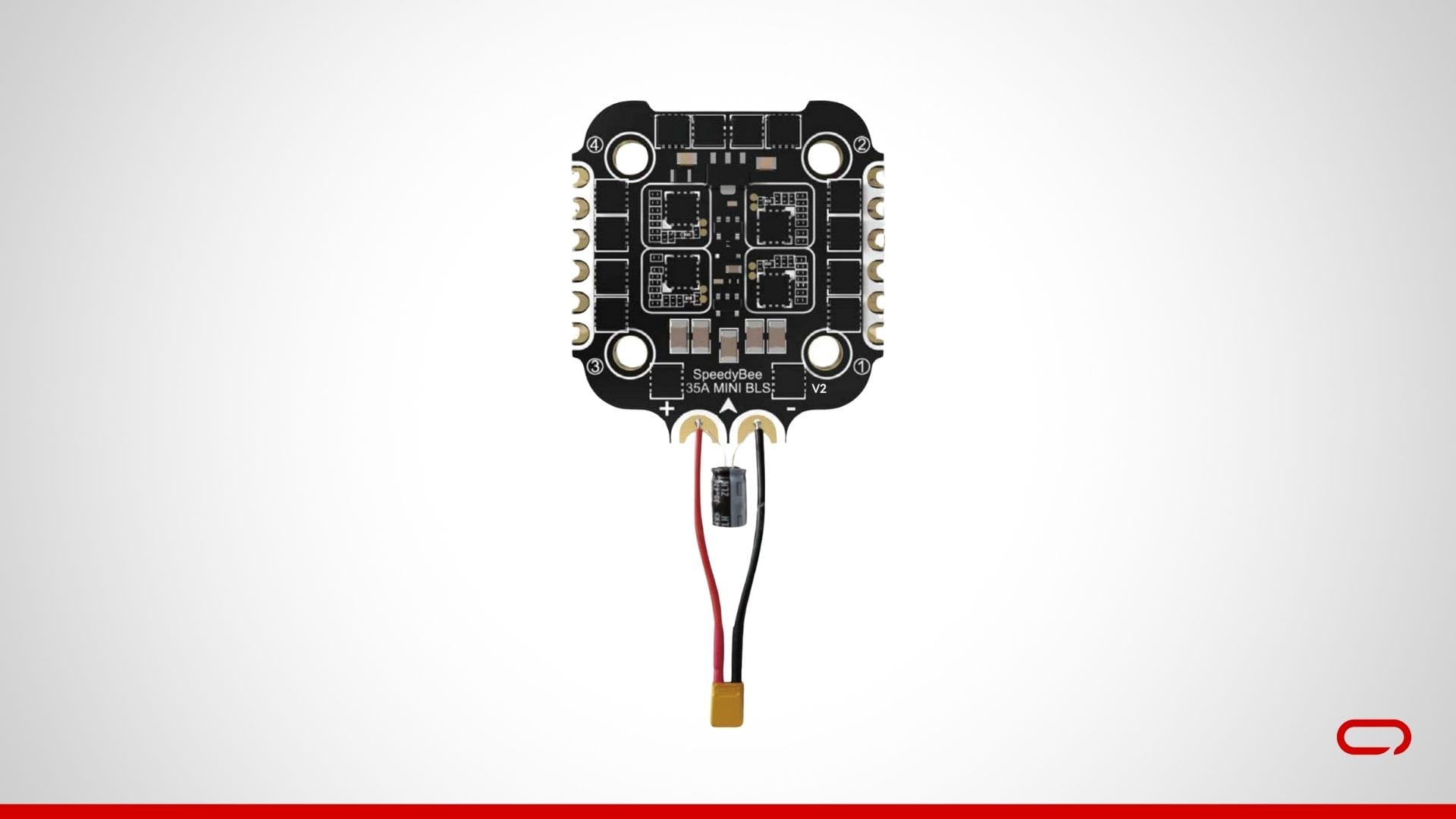
- Set up the Capacitor: Set up the capacitor by the holes throughout the + and – pads to assist filter out voltage spikes and noise.
- Solder the Battery Leads: Solder the battery results in the ESC pads. This entails connecting the constructive wire (crimson) to the + pad and the unfavourable wire (black) to the – pad. Use the next temperature and a great quantity of solder to make sure a robust connection.

💡
Watch out of the capacitor polarity. You’ll be able to determine the unfavourable facet by the „-“ image marked on the facet of the capacitor
Step 6: Soldering the Motors to the ESC

Join the Motors to the ESC: Solder the motor wires to the ESC pads on the flight controller board. Every motor can have three wires that should be related to the corresponding pads on the ESC:
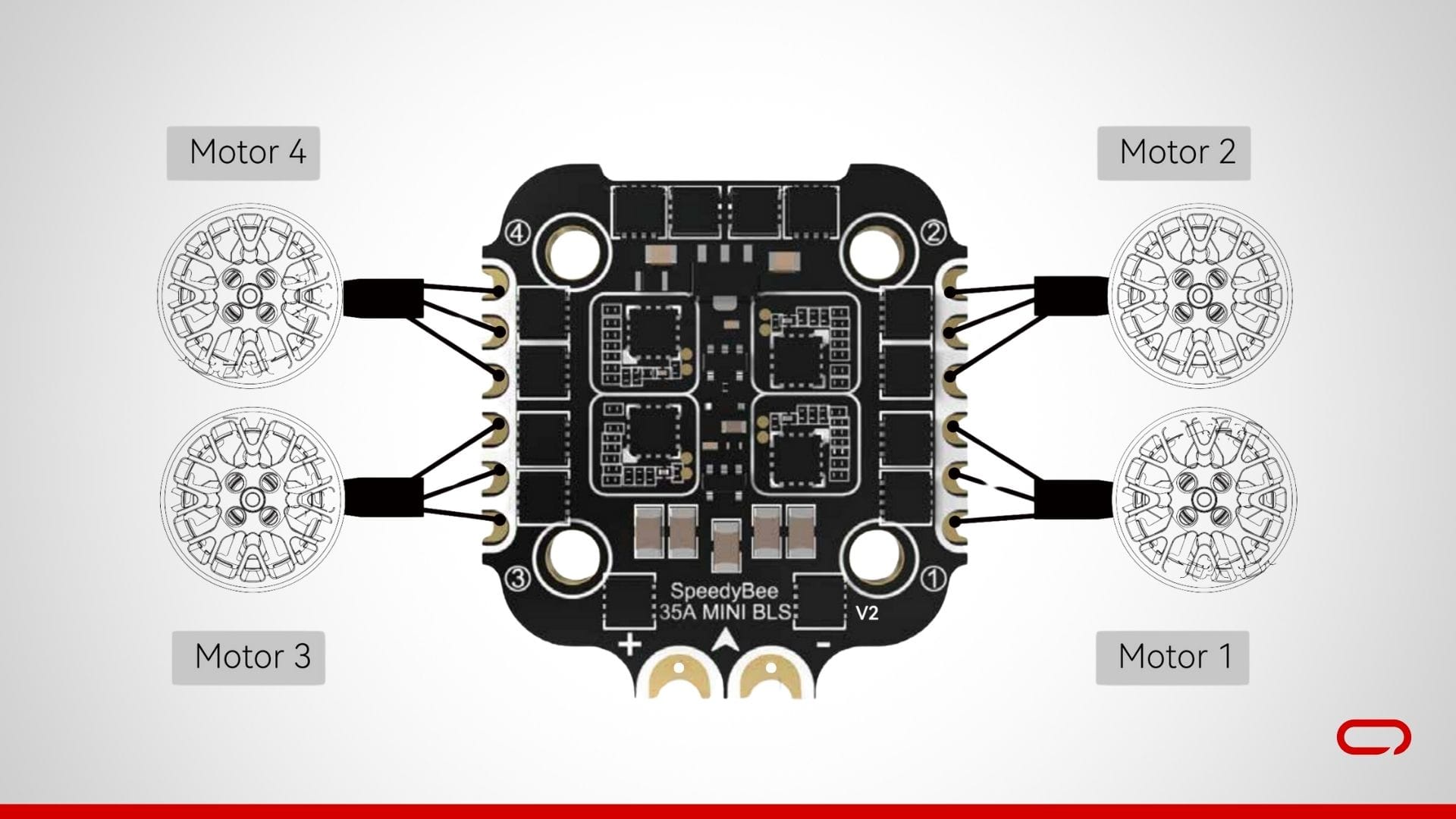
- Motor 1: Connect with M1 pads.
- Motor 2: Connect with M2 pads.
- Motor 3: Connect with M3 pads.
- Motor 4: Connect with M4 pads.
💡
Safe the Motors: Quickly safe the motors to keep away from pressure on the solder joints. You’ll be able to finalize the mounting later.
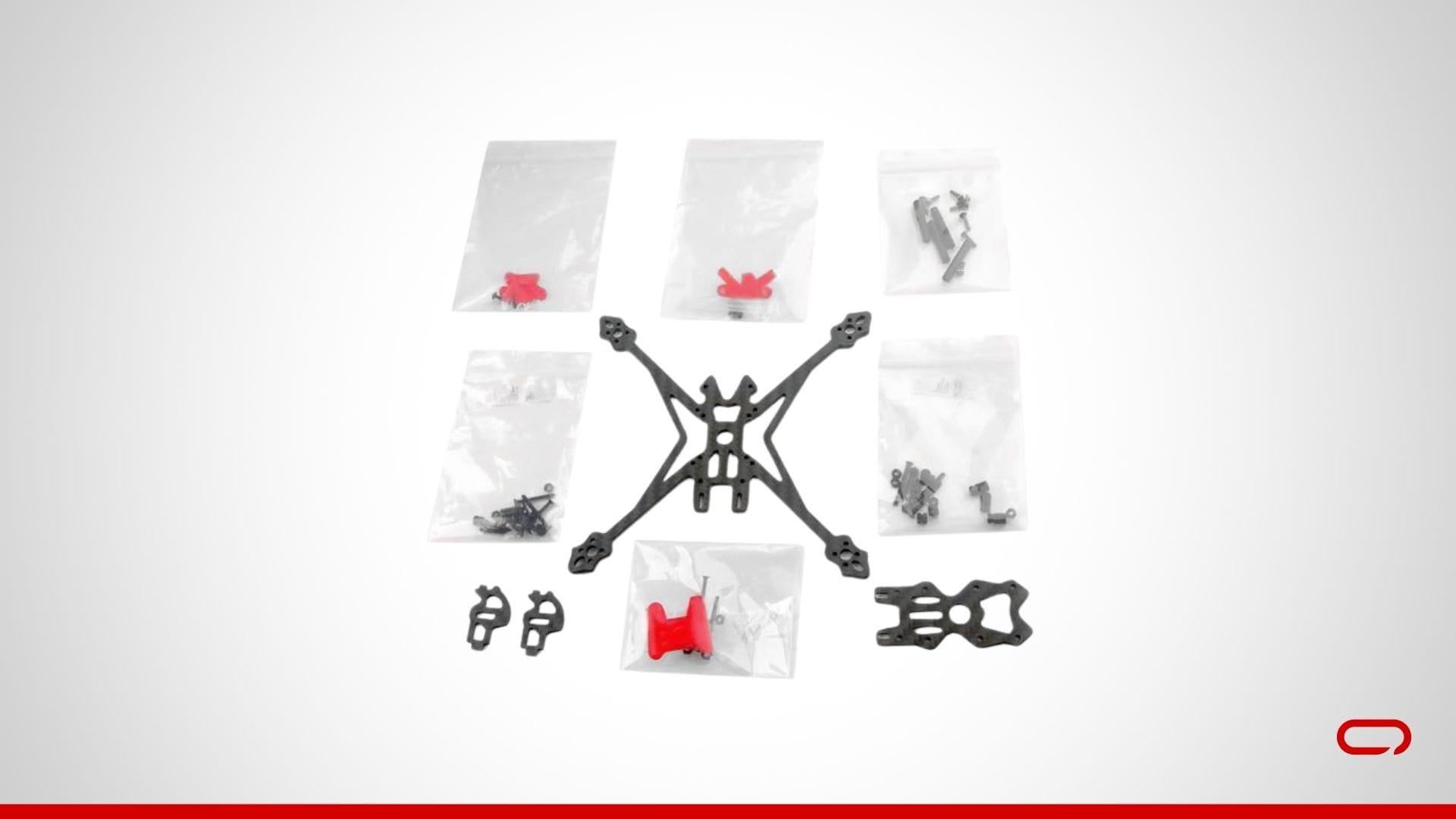
Step 7: Assembling Parts to the Body

- Unbox the Body: Begin by unboxing the HappyModel Crux35 3.5 Inch Body. Lay out all of the elements to make sure you have every part you want. First, run the battery strap by the backplate.
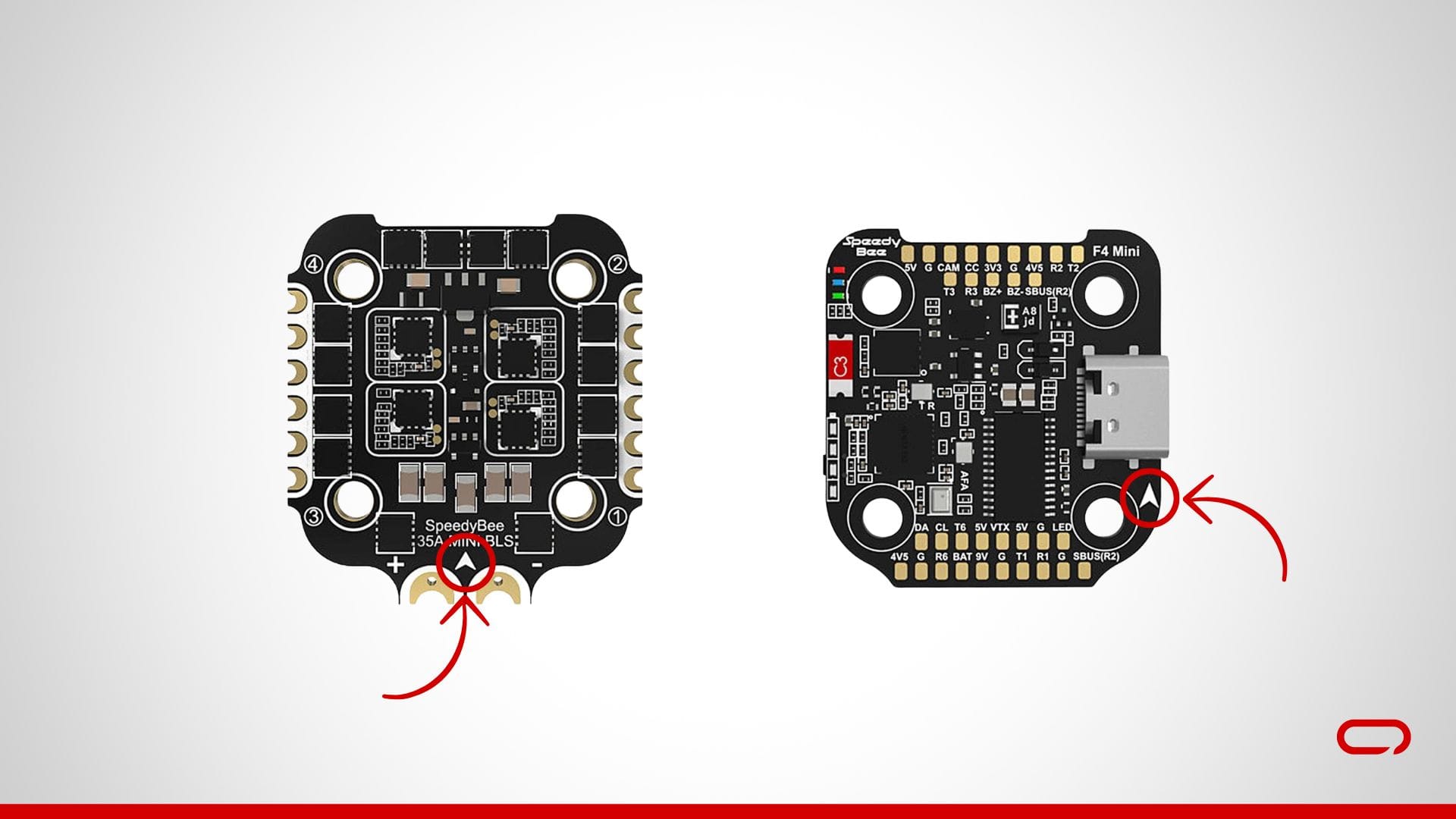
- Set up the ESC: Use the M2 screws offered, making certain they’re of the suitable size. Place the ESC within the middle of the body and run the M2 screws by the holes within the middle of the body. Make sure the arrow on each the FC and ESC is dealing with up and ahead, in the direction of the digicam. This orientation is essential for correct functioning.
- Add the Flight Controller (FC): Place the FC on prime of the ESC, aligning the mounting holes. Safe the FC with the offered nuts. Tighten the nuts so they’re comfortable however not overly tight. Make sure the arrow on each the FC and ESC is dealing with up and ahead, in the direction of the digicam. This orientation is essential for correct functioning.
- Mount the Motors: Connect the Happymodel EX1404 motors to the designated motor mounts on the body utilizing the offered screws. Be sure that the motors are securely mounted.
- Set up the FPV Digital camera: Take the digicam bracket and use the M2 screws offered to mount the digicam securely within the bracket. Connect the bracket to the designated spot on the body on the entrance.
- Set up the VTX: The VTX might be mounted on the highest plate of the body. Use M2 screws, zip ties, or double-sided tape to safe the VTX in place.
- Set up the Receiver: Mount the receiver behind the drone. Use zip ties or double-sided tape to safe the receiver. Slip the antenna by the TPU half vertically for optimum sign reception.
💡
The location of sure elements is basically primarily based on private desire and aesthetics. Be happy to regulate their places or search inspiration from on-line sources. Sometimes, the VTX and receiver are mounted on the again to make the most of the TPU antenna holder, particularly if you’re utilizing a customized antenna.

Step 8: Assembling the Body
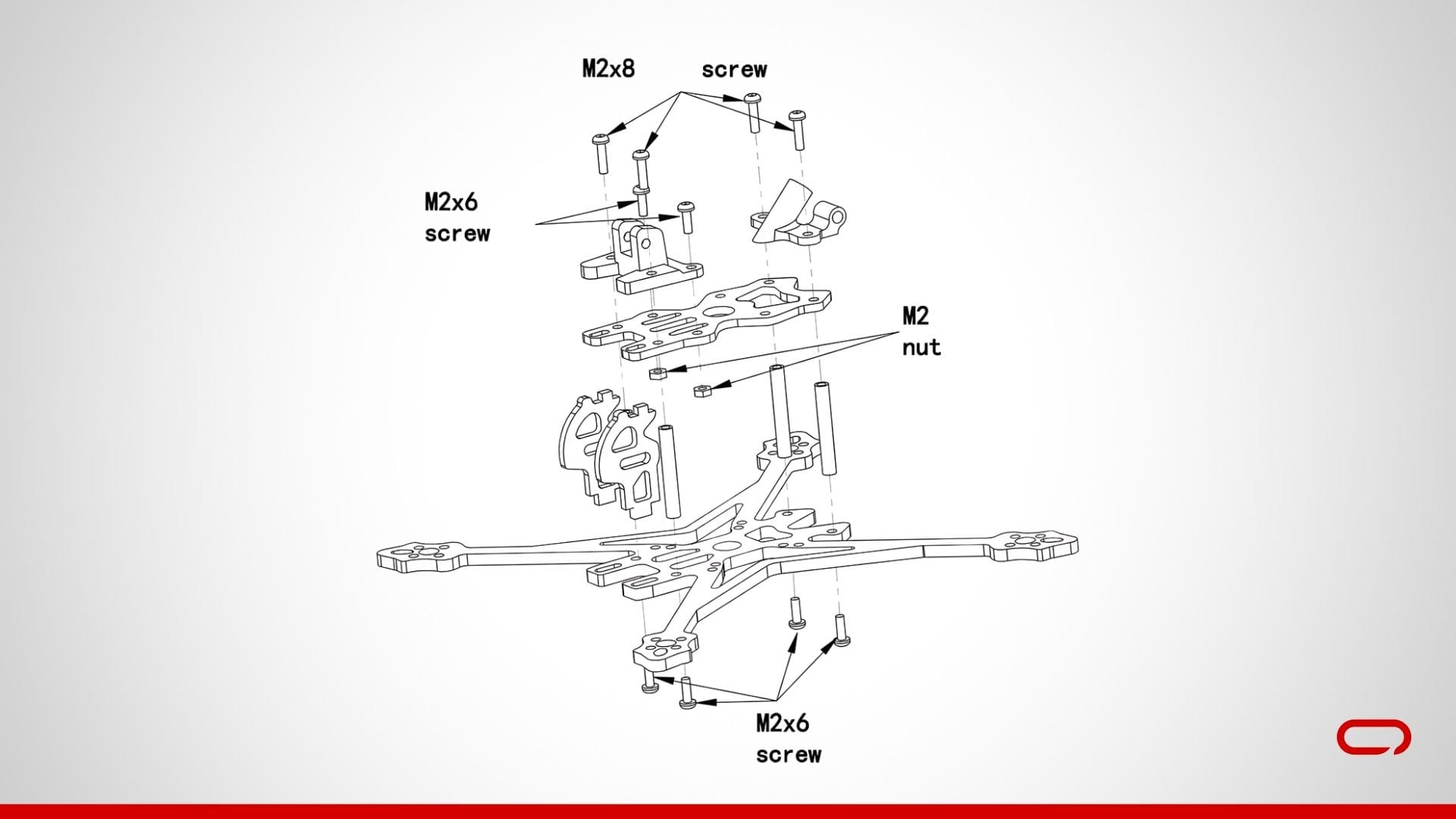
- Add the Spacers: Insert the spacers into the designated slots on the body. Safe the spacers with the offered M2x6 screws.
- Connect the TPU Elements: Place the TPU components of their designated places on the highest plate. Safe the TPU components utilizing the M2x6 screws and the M2 nuts offered.
- Set up the High Plate: Place the highest plate on the spacers. Use the M2x8 screws offered to safe the highest plate to the spacers, making certain it’s tightly fitted.
- Set up the Battery Pad: Apply the battery pad sticker on the backside of the drone.
💡
Check with the diagram under for detailed placement of every element and guarantee all components are accurately positioned and securely mounted.
Step 9: Bench Testing
- Preliminary Energy Test: Join the battery and energy up your drone utilizing the smoke stopper with out propellers. Be sure that all elements energy on accurately.
- Test Motor Path: Use Betaflight to examine the motor instructions. Be sure that every motor spins within the appropriate course. If a motor is spinning within the incorrect course, you possibly can reverse it in Betaflight.
- Set your UART: In Betaflight, navigate to the Ports tab. Set the peripherals for UART1 to VTX (TBS SmartAudio) and Allow Serial RX for UART2.
- Apply Presets: Within the Presets tab of Betaflight, seek for „Rush Tiny Tank.“ Click on on it, choose „Rush Tiny Tank“ from the dropdown record, after which apply the preset. Do the identical for ExpressLRS 250Hz or 500Hz, relying in your transmitter (controller) settings.
- Confirm Digital camera and VTX: Be sure that the digicam feed is being transmitted accurately and that the VTX is about to the right channel and energy degree.
- Receiver Binding: Bind your transmitter (controller) to the SpeedyBee Nano 2.4G ExpressLRS ELRS Receiver in keeping with the producer’s directions. Confirm that each one controls are working accurately.
Step 10: Propellers and Ultimate Checks
- Connect the Propellers: Safe the propellers to the motors. Be sure that the propellers are oriented accurately in keeping with the motor rotation course (clockwise or counterclockwise).
- Ultimate Test: Double-check all connections, screws, and settings. Be sure that every part is safe and that there are not any unfastened wires.
Step 11: Check Flight
- Security Test: Earlier than the primary flight, double-check all screws, connections, and settings.
- Energy Up: Join the battery and energy up your drone with out the smoke stopper. Be sure that all elements are working accurately.
- Maiden Flight: Carry out a maiden flight in a protected, open space. Begin with light maneuvers to make sure every part is functioning correctly.
Conclusion
Congratulations! You’ve got efficiently assembled your FPV drone. Constructing your personal drone is usually a advanced but extremely rewarding expertise, offering you with a deeper understanding of how drones work and the satisfaction of flying one thing you’ve got created your self. Get pleasure from your flights and all the time prioritize security. Glad flying!
Be happy to achieve out within the feedback when you’ve got any questions or want additional help.














{kind=link}